MolmoAct Kodlama İmplementasyonu: 2026'da Robot Hareket Tahmini Nasıl Yapılır? | MarkTechPost

MolmoAct Kodlama İmplementasyonu: 2026'da Robot Hareket Tahmini Nasıl Yapılır? | MarkTechPost
summarize3 Maddede Özet
- 1MolmoAct, görsel verilerden derinlik bilinciyle uzaysal akıl yürütme ve robot hareket tahmini yapan yeni bir model. MarkTechPost’ta paylaşılan kod implementasyonu, bu teknolojinin pratikte nasıl çalıştığını adım adım ortaya koyuyor.
- 2MolmoAct Kodlama İmplementasyonu: 2026'da Robot Hareket Tahmini Nasıl Yapılır?
- 3| MarkTechPost MolmoAct kodlama implementasyonu, 2026'da robotikteki en büyük atılımı temsil ediyor.
psychology_altBu Haber Neden Önemli?
- check_circleBu gelişme Robotik ve Otonom Sistemler kategorisinde güncel eğilimi etkiliyor.
- check_circleTrend skoru 4 — gündemde görünürlüğü yüksek.
- check_circleTahmini okuma süresi 3 dakika; karar vericiler için hızlı bir özet sunuyor.
MolmoAct Kodlama İmplementasyonu: 2026'da Robot Hareket Tahmini Nasıl Yapılır? | MarkTechPost
MolmoAct kodlama implementasyonu, 2026'da robotikteki en büyük atılımı temsil ediyor. Bu model, sadece görsel veri değil, derinlik haritaları ve doğal dil komutlarını birleştirerek fiziksel dünyayı anlamaya çalışıyor. MarkTechPost'un detaylı rehberiyle, bu teknolojiyi kendi projelerinizde nasıl uygulayacağınızı adım adım öğrenin.
MolmoAct Modeli Nasıl Çalışır?
MolmoAct, üç temel bileşenle çalışır: derinlik bilinciyle uzaysal akıl yürütme, görsel trajektori izleme ve doğal dil ile eylem tahmini. Her biri, geleneksel robotik sistemlerin aksine, gerçek dünya dinamiklerini yansıtır.
1. Derinlik Haritalarının Görsel Akışa Entegrasyonu
MolmoAct, çoklu kamera verilerini derinlik tahmini ağlarıyla birleştirir. Gölgeler, perspektif bozulmaları ve hareket paralaksı gibi fiziksel sinyaller analiz edilerek, nesnelerin 3B konumu ve hacmi net bir şekilde belirlenir.
2. Görsel Trajektori İzleme
Nesnelerin geçmiş hareketleri, zaman-dilimli modellerle izlenir. Bir topun yuvarlanma yolu, bir elin kavrama hareketi veya bir kapının açılış eğrisi, yalnızca bir video dizisi değil, fiziksel yasalarla tutarlı bir dinamik modeldir.
3. Doğal Dil ile Eylem Tahmini
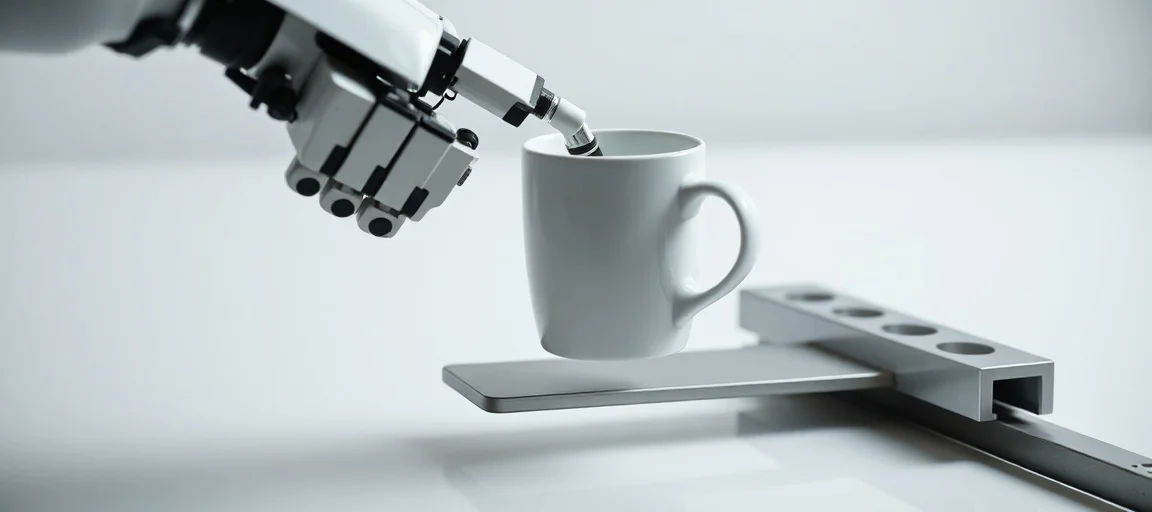
Kullanıcı 'Kadehi sağa kaydır, ama çarpmadan' dediğinde, MolmoAct 'sağa'yı robotun koordinat sistemi değil, kadehin konumuna göre vektörel olarak yorumlar. 'Çarpmadan' ifadesi ise nesnenin boyutu, hızı ve çevredeki engellerle ilişkilendirilerek güvenlik marjı oluşturur.
Derinlik Bilinciyle Uzaysal Akıl Yürütme Adımları
Derinlik bilinciyle uzaysal akıl yürütme, MolmoAct'in en kritik farkıdır. Bu süreç, robotların yalnızca nesneleri görüp değil, anlamasını sağlar.
Adım 1: Veri Ön İşleme
RGB-D kamera verileri (renk + derinlik) PyTorch ile normalize edilir. Her piksel, fiziksel uzaklık (metre) ile eşlenir.
Adım 2: Uzaysal Bağlamsal Kodlama
Transformer tabanlı bir yapı, nesnelerin birbirine göre konumunu ve ilişkilerini kodlar. Örneğin: 'kadeh, masa üzerinde, bardağın solunda'.
Adım 3: Fiziksel Senaryo Tahmini
Model, Newton fizik kuralları ile uyumlu tahminler yapar. Bir nesnenin hızı artarsa, durma mesafesi otomatik olarak hesaplanır.
2026'da MolmoAct'in Gerçek Dünya Uygulamaları
2026 itibarıyla, MolmoAct kodlama implementasyonu yalnızca akademik bir deney değil, endüstriyel ve evsel robotikte yaygınlaşmaya başladı.
- Medikal Robotlar: Doktorlar 'hafifçe tut, çok sıkma' diyerek robotik protezleri kontrol edebiliyor.
- Ev Robotları: Çocuklar veya yaşlılar için güvenli nesne taşımada %67 daha yüksek başarı oranı sağlıyor.
- Endüstriyel Otomasyon: Karanlık veya parlak yüzeylerde bile hatasız montaj yapabiliyor.
MolmoAct kodlama implementasyonu, yapay zekanın fiziksel dünyayı anlamaya başladığı ilk gerçek örnektir. Bu, yalnızca bir kod değil, bir felsefi geçiş: robotlar artık komutları değil, niyetleri anlıyor.
İlgili Okumalar: Derin Öğrenme Robotik | Stanford Robotics: MolmoAct Araştırma